О компании

Робототехнические конструкторы


>
Шагающий робот Тетработ
Шагающий робот
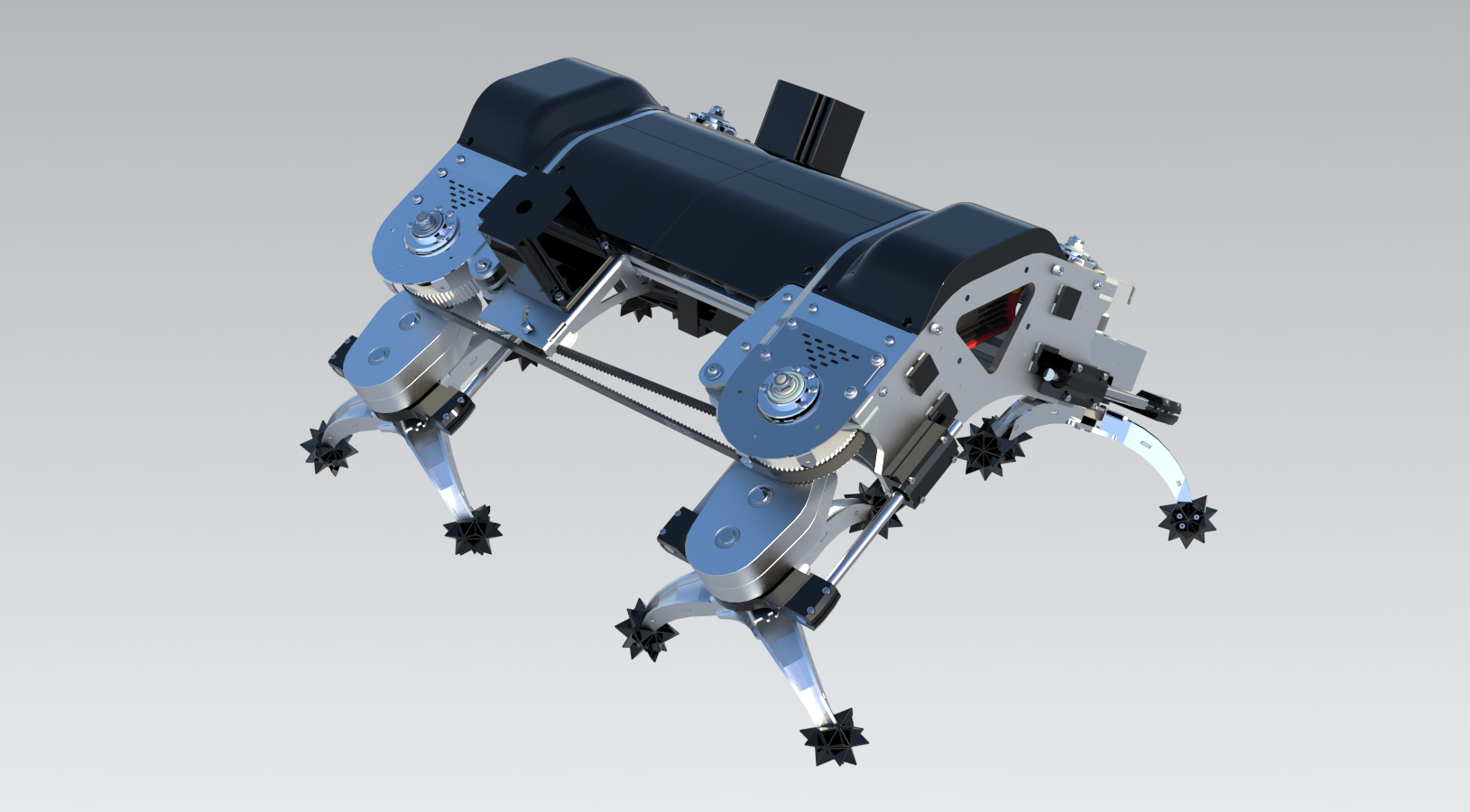
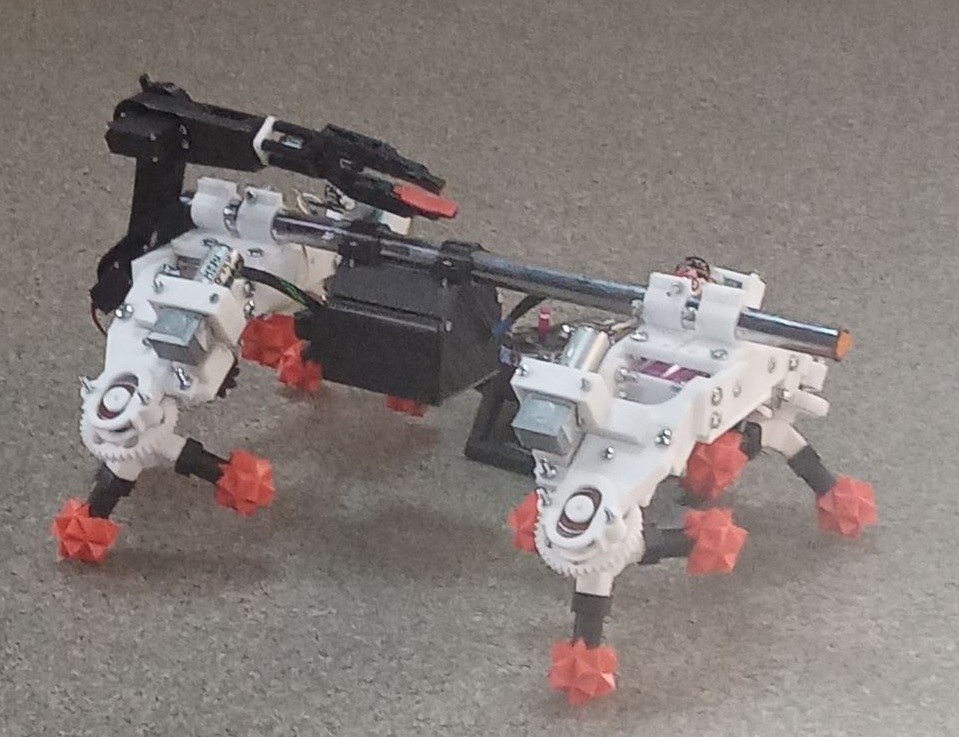
Обший вид
Шагающий робот
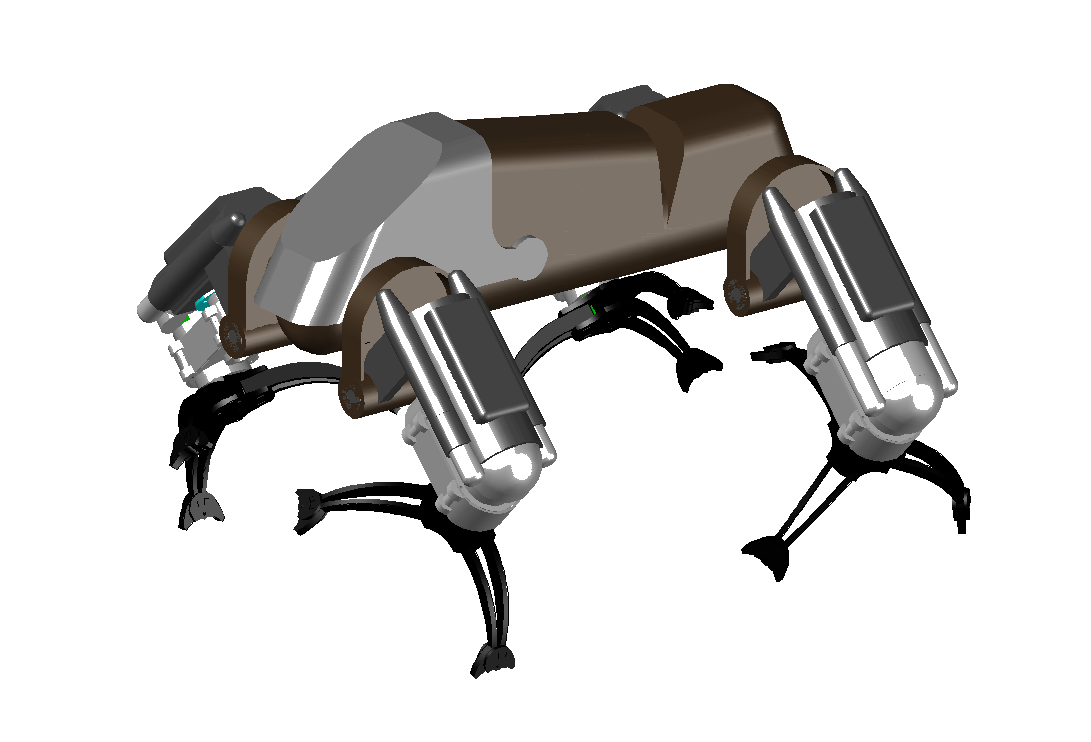
Положение сидя
Шагающий робот
Ползком или вплавь
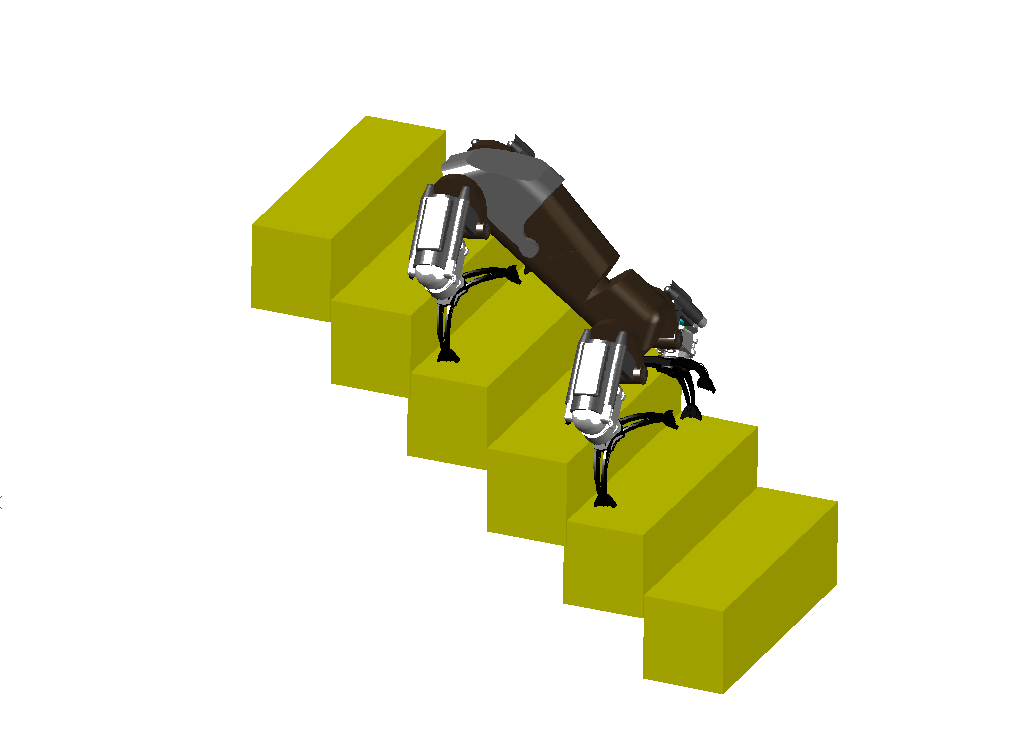
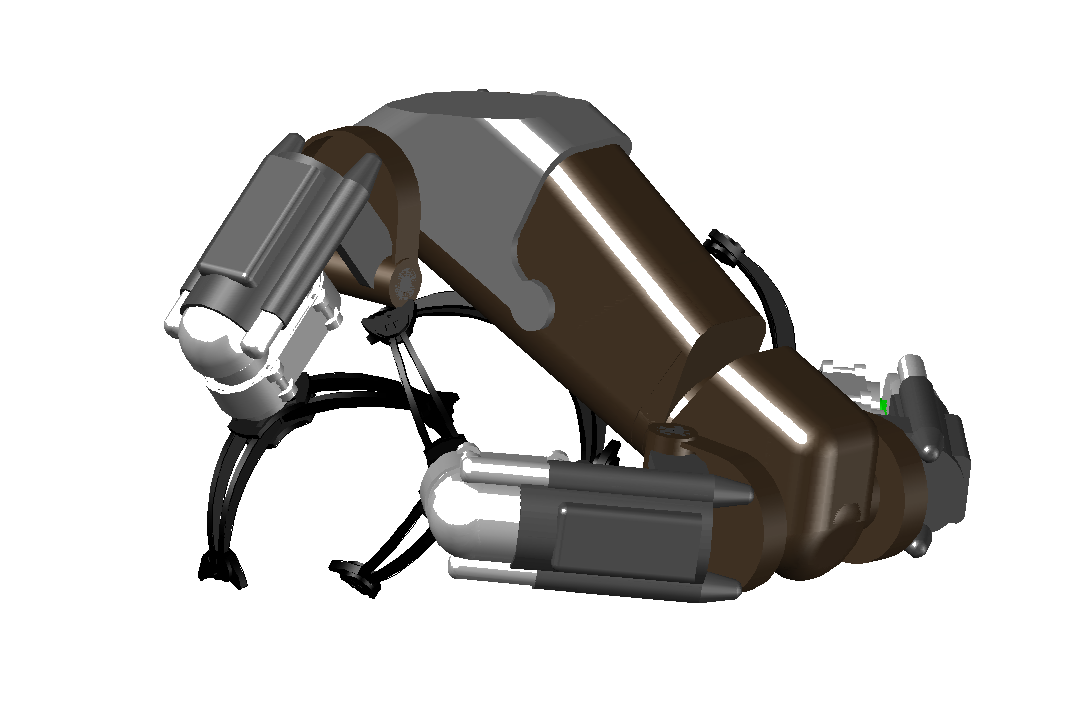
Шагающий робот
Подъем по лестнице
>
площадка МГУ


место на карте
Объект в Люберцах

место на карте
площадка морского терминала

В Вистино нам еще много чего нужно построить. Есть школа, которую нужно реновировать, необходим новый детский сад, современный Дом культуры, привести в порядок дороги, разбить современный парк.