Основные направления:
- сервисная робототехника и управление робототехникой на основе ИИ
- образовательная робототехника, робототехнические конструкторы
Привет друзья. Детям, да и взрослым тоже чего скрывать нравятся крутые роботы, но к сожалению пока их можно увидеть разве что в сети на зарубежных видео. А как вам идея собрать своего шагающего робота из недорогого отечественного конструктора, который сможет узнавать домашних, ходить по лестницам, гулять во дворе и приносить различные предметы.
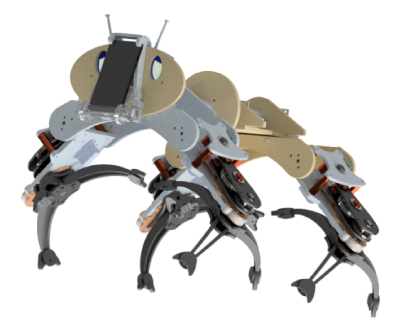
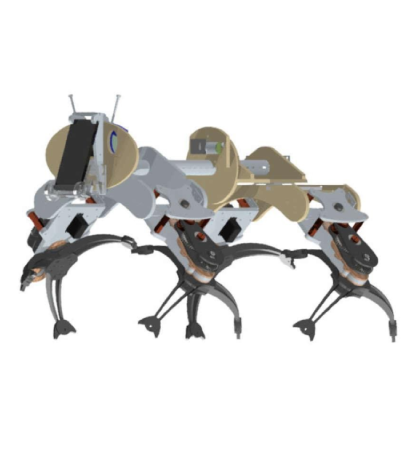
Практически все создаваемые роботы в мире копируют животных или человека, их называют биоморфными или биоподобными. Но это приводит к необходимости использовать десятки сервоприводов с редукторами, заменяющих мышцы. У нашего робота нет аналогов ни среди других роботов, ни в живой природе. В основе робота уникальный запатентованный механизм передвижения. Его отличает высокая проходимость и всего один сервопривод на одну конечность, в качестве которой используется необычная тренога. Это стало возможным благодаря изобретенному механизму компенсации колебаний, возникающих при вращении треноги.
При этом шагающая платформа легко перемещается по лестницам, завалам и другим препятствиям. Необычная конструкция ног в виде треноги позволяет роботу не только ходить, но и брать с их помощью различные предметы, при этом добавляется всего один сервопривод. У самой навороченной модели робота из нашего конструктора всего 5 сервоприводов, один мотор и 6 абсолютных энкодеров (датчиков положения). Небольшое количество двигателей и датчиков позволяет легче запрограммировать робота на совершение разных действий. А энергии аккумуляторов хватит на большее время работы по сравнению с шагающими роботами из других конструкторов, содержащих свыше десятка сервоприводов. В качестве управляющей платы используется популярная плата Arduino, поэтому для многих, знакомых с этой платформой, программирование робота не будет сложной задачей. Сегодня конструктор готов на 90%, нам осталось доработать механическую часть до запуска в серийное производство и «допилить» программную платформу для управления роботом совместно с Университетом Искусственного Интеллекта.
Мы рады представить наш робототехнический проект Тетработ, который поможет осуществить мечту вашего ребенка или вашу мечту о своем шагающем роботе. Из нашего конструктора вы соберете не игрушку, а небольшого робота-помощника. Искусственного питомца многому можно будет научить, например, собирать вещи в комнате, ориентироваться в окружающем пространстве, ходить по квартире, по дому, по лестнице и по двору, узнавать и общаться. Конструктор поможет быстрее освоить программирование, азы электроники и механики. Робототехника — профессия будущего!
Совместный проект с Университетом искусственного интеллекта: система распознавания голоса для образовательного робототехнического конструктора “Тетработ старт”.
Основным направлением деятельности компании ООО “Тетработ” является разработка в сфере мехатроники и робототехники с использованием технологий искусственного интеллекта. Именно поэтому в рамках сотрудничества между компанией Тетработ и Университетом искусственного интеллекта (ООО “Терра ЭйАй”) был реализован проект по созданию системы распознавания голосовых команд для роботов-конструкторов, представляющих собой набор различных сервоприводов, колесных приводов, клешней и блока управления.
Задача и реализация проекта
В рамках работы над проектом команда стажеров из Университета искусственного интеллекта должна была разработать нейронную сеть с высокой точностью, способную распознавать голос и передавать соответствующие команды на блок управления роботом. Блок управления программируется с использованием Arduino и определенного программного обеспечения, которое необходимо было представить в виде Android-приложения для управления роботом со смартфона. Однако при использовании предоставленного датасета с голосами детей и короткими командами стало ясно, что такой подход будет неэффективен, и проект был пересмотрен. Со стороны Университета были предложены новые гипотезы для достижения необходимого результата.
Вместо того, чтобы создавать нейронную сеть с нуля, проектная команда приняла решение воспользоваться технологиями Google’s SpeechRecognition и мобильной версией Vosk. В конечном итоге была реализована эффективная система распознавания голоса с использованием библиотеки Vosk, так как она предоставляет мобильную версию с поддержкой русского языка. Полученный текст из голоса сопоставлялся с командой, представленной двухбайтовым кодом, и передавался на Arduino. После решения всех технических трудностей разработчики успешно настроили соединение между Android-приложением и роботом через Wi-Fi.
Итоги и перспективы
В ходе проекта было разработано приложение, способное принимать голосовые команды, обрабатывать их и передавать на Arduino. Более того, приложение включает в себя функцию запоминания аварийных ситуаций, позволяя роботу выполнять функции остановки и возобновления работы. Также участниками была продемонстрирована возможность управления роботом через скрипты, включая простые команды (например, двигаться вперед, назад, поворачиваться) и сложные составные команды.
Компания Тетработ выражает благодарность всем, кто участвовал в разработке. Было проработано большое количество гипотез и реализовано несколько вариантов рабочих решений. В итоге был получен не только качественный результат, но и созданы перспективы для дальнейшего развития проекта. С нетерпением ожидаем будущего сотрудничества с командой разработчиков Университета искусственного интеллекта в решении следующих задач по проекту образовательного робототехнического конструктора “Тетработ старт”.
Команда Университета:
Руководитель проекта тимлид —
Терещенко Алесей Владимирович
Команда стажеров
Некрасова Татьяна Владимировна,
Скрипник Игорь Алексеевич,
Новиков Андрей Викторович,
Жидовинов Никита Иванович,
Маркин Владимир Анатольевич,
Шалунов Андрей Сергеевич,
Горина Анастасия Алексеевна,
Свириденко Дмитрий Михайлович,
Мурунов Роман Владимирович,
Иванова Наталья Александровна,
Леснов Петр Александрович.
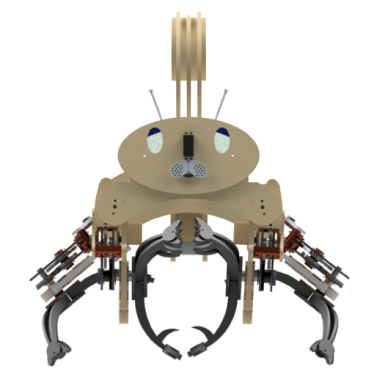
Робототехнический конструктор «Тетработ-старт» — это 4-е базовых модели робота: тетработ-помощник, тетработ-вездеход, тетработ-носильщик и тетработ-лазутчик.

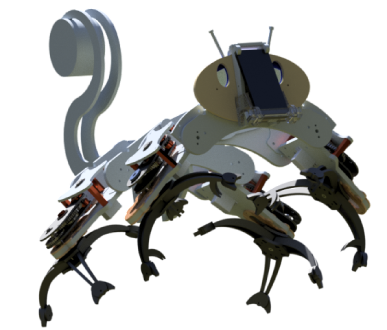
Робот способен передвигаться по пересеченной местности, брать передними лапами небольшие грузы и переносить их на задних лапах, опираясь для устойчивости на свой хвост.
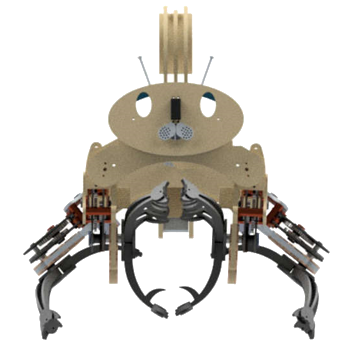
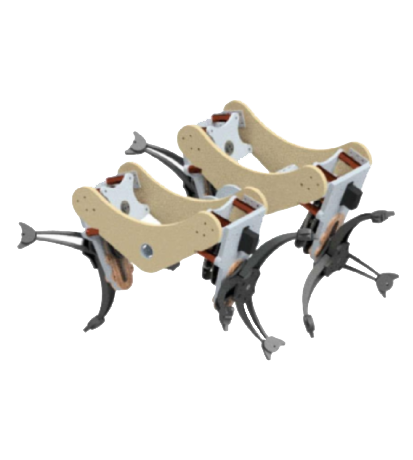
Робот отличается повышенной маневренностью при движении по пересеченной местности за счет независимых и управляемых мостов. Способен вставать на лапы в случае опрокидывания.
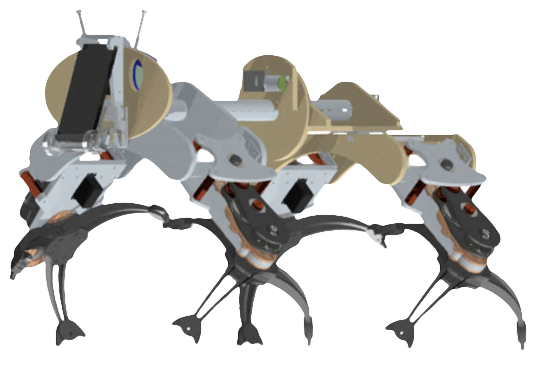
Данная модель отличается большим запасом хода и повышенной устойчивостью. Может быть использована для переноса грузов на своей спинке, а также в качестве несущей платформы для различных приспособлений, например для руки-манипулятора.
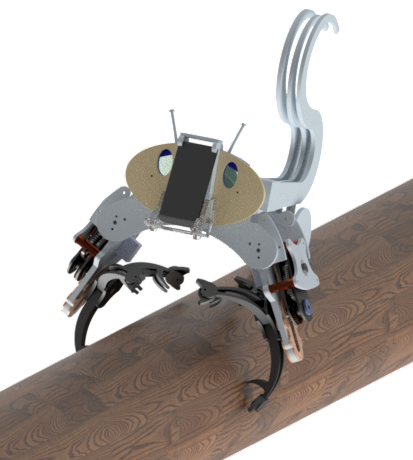
Робот способен перемещаться по пересеченной местности, вращать хвостом изменяя свое положение, сжимать передние лапки обхватывая ими бревно или трубу и при этом механизм лап позволяет вращать их не ослабляя обхват. Это свойство дает возможность перемещаться роботу по бревну, трубе и даже по канату.